W12 <<
Previous Next >> W16
W13
老師希望我們能用RoboDK模擬機械手臂把球拿起以及放下。
來源:http://mde.tw/cd2021/content/W13.html
老師的範例影片:
我的示範影片:
下載資料:
https://drive.google.com/file/d/1XoB3F5cPK8R4Y8AIWL5pKR5TQjPW8TRv/view?usp=sharing
打開RoboDK.exe


進入RoboDK後打開機械手臂模型
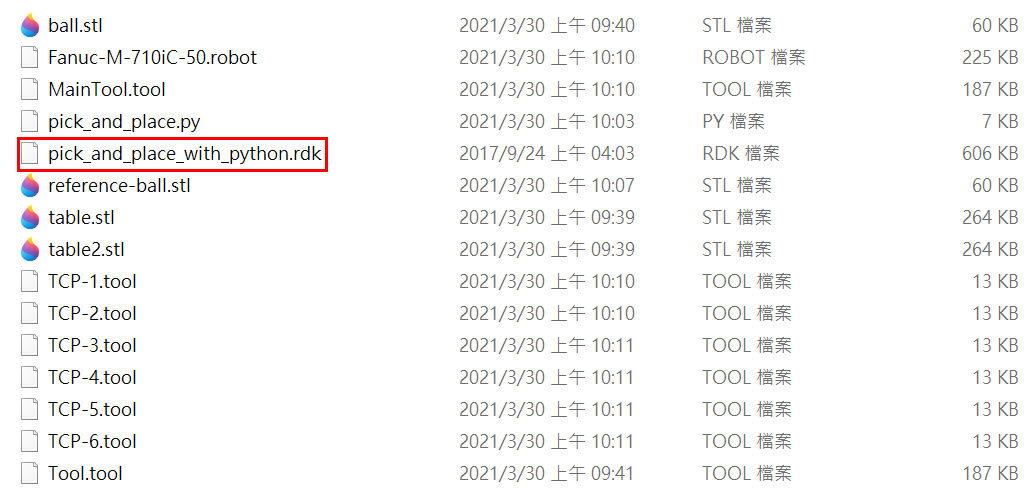
點選此檔案,機械手臂模型為rdk檔

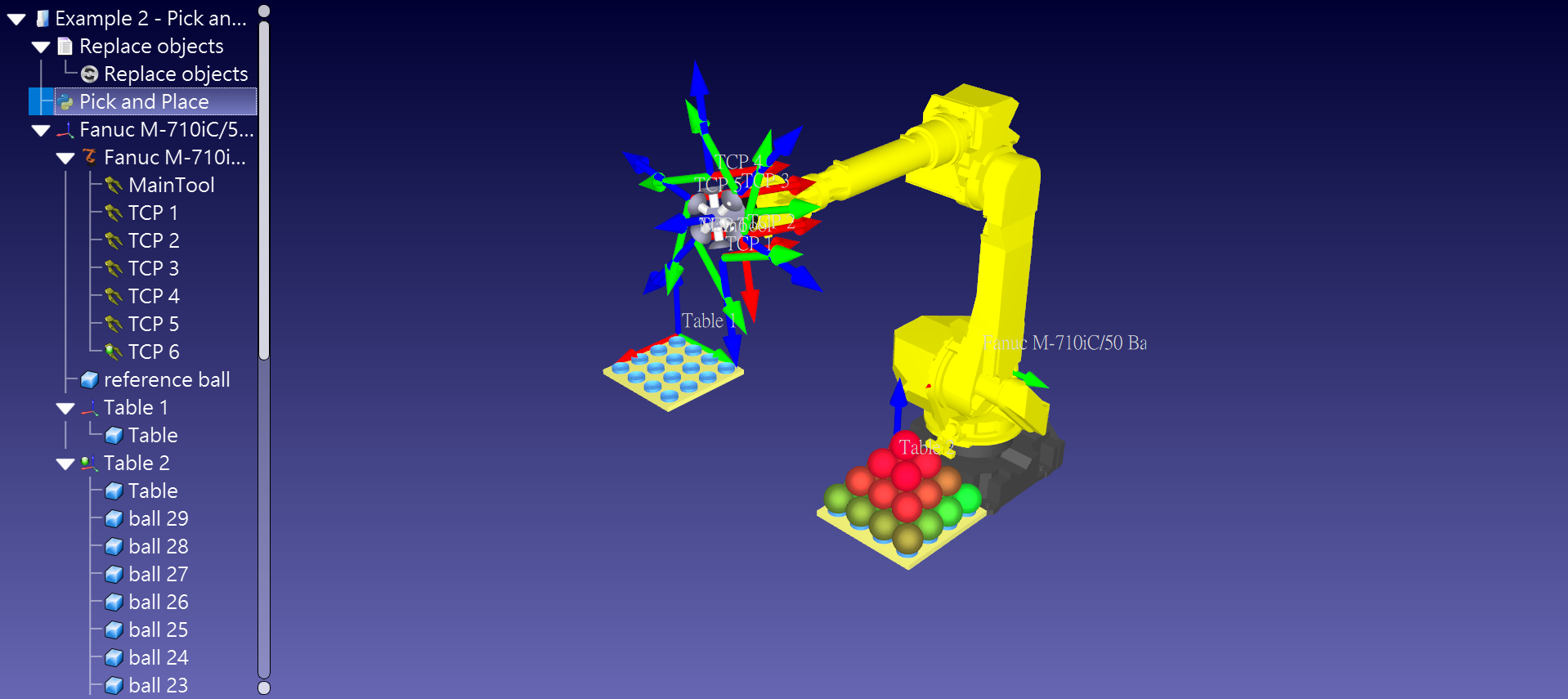
成功開啟後的樣子
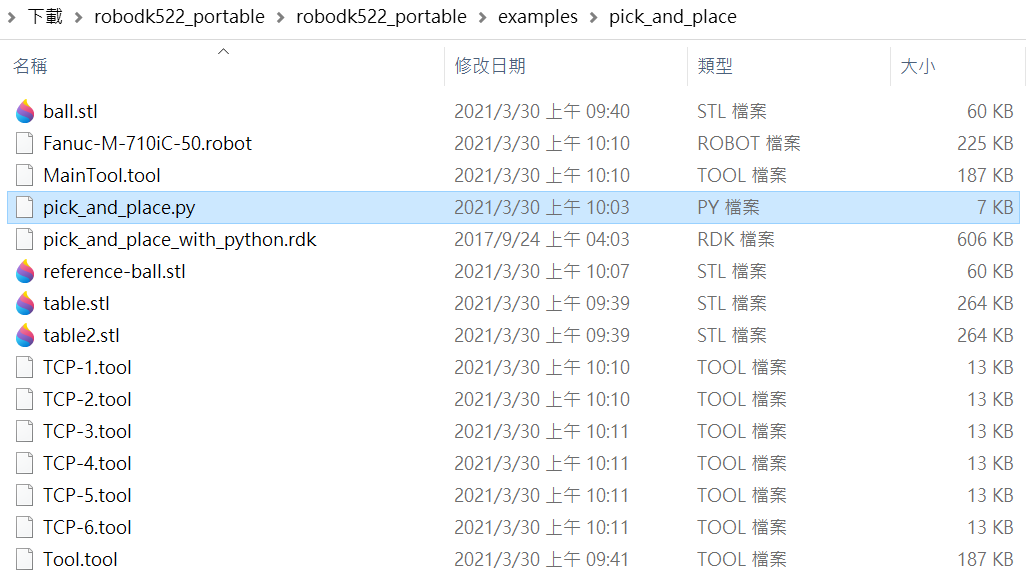
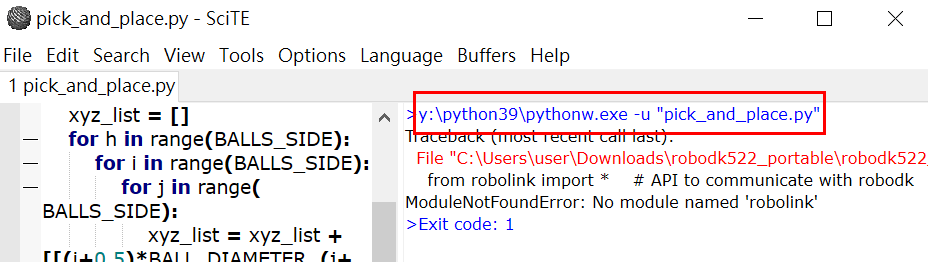
將pick_and_place.py檔案丟入白窗
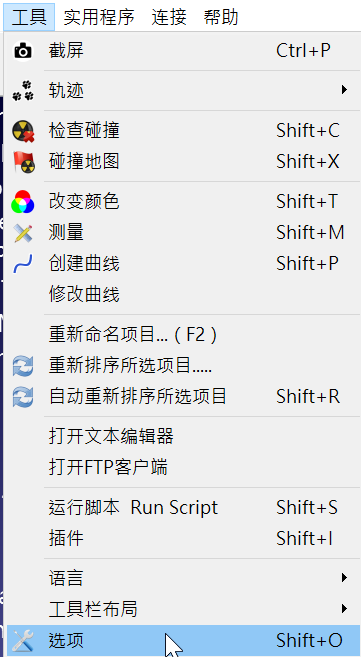
到Tools按go後複製這一串文字
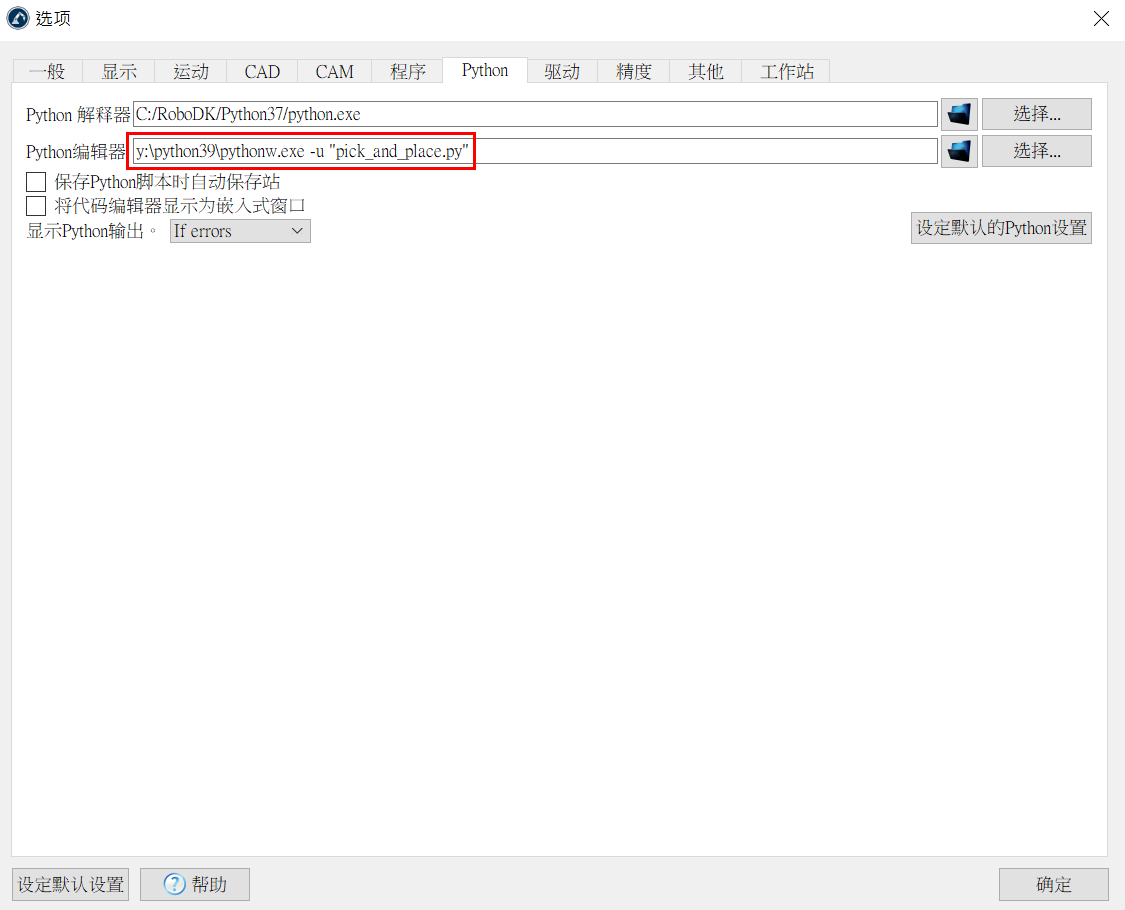
到RoboDK修改設定以及參數
到python頁面下,將剛才複製的路徑貼上,按確定
右鍵Pick and Place,點編輯python程序,機械手臂即能自動撿球

W12 <<
Previous Next >> W16